
2010In this year , more and more researches about using autonomous robotics in construction industry were brought to stage , such as : development of Tele-Operated robotics in construction , Physics-based simulation approach , VR-method of path safety . Also the research on inspecting pavement distresses was continued and a research on Dual-Light inspection method was started . Besides , an accessibility evaluating system was also developed .
|
|
Accessibility Evaluating System |
Developed an accessibility evaluating system for site layout planning and use a tractor trailer as an example .
|
開發一個為現場配置計畫設計的評測系統並以拖曳式拖車為例。
|
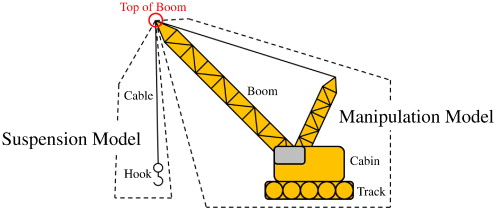
Tele-Operated Crane |
This research focused on the interface design of a tele-operated crane by using markerless augmented reality (AR) technologies and considering human attention .
|
此研究主要著重於藉由AR科技的幫助,設計其使用者介面,並使其能提醒使用者,提高施作時的安全性。
|
Physics-based Simulation |
Developed a physics-based simulation of cooperative erection activities.
|
開發一物理模擬環境以用於觀測工程安裝時的狀況。
|
Safety in construction site |
Using the accessibility evaluating system to develop a method for engineers to identify potential problems and unsafe situations early in the design and planning stages .
|
藉由現場配置計畫的評測系統,使工程師能夠在設計及計畫階段即可察覺潛在的問題與不安全的狀況。
|
Application in constructing industry |
Investigating the application of autonomous robotics in constructing industry .
|
探討智慧機器人在營建產業上之應用。
|
Dual-Light inspection method |
This research aims to develop an innovative inspection system that is portable, simple, affordable, and can be easily applied on smaller yet large number objects .
|
此研究主要目的在於建立一個創新的檢測系統,使其可以簡單的操作使用在大型或小型的物件上。
|
Pavement distresses |
Strategies for autonomous robots to inspect pavement distresses .
|
發展使用自動化機器人作為路面問題檢測的策略。
|
