
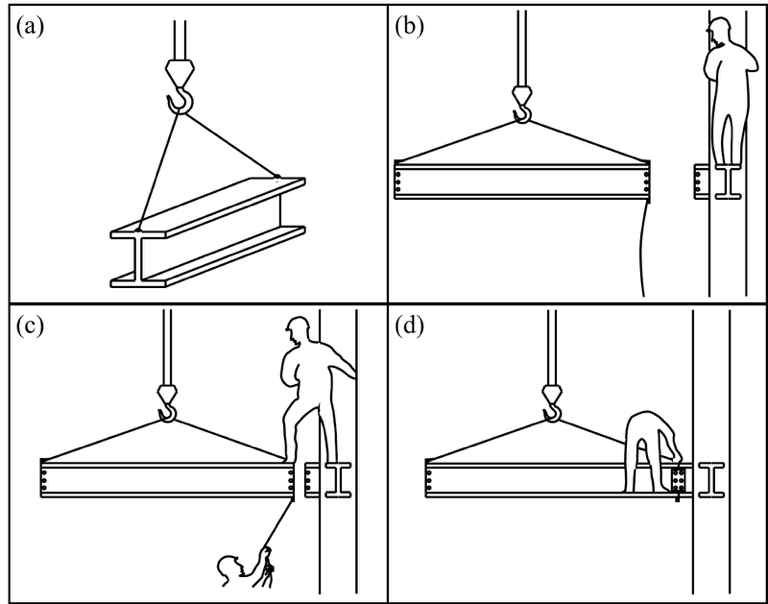
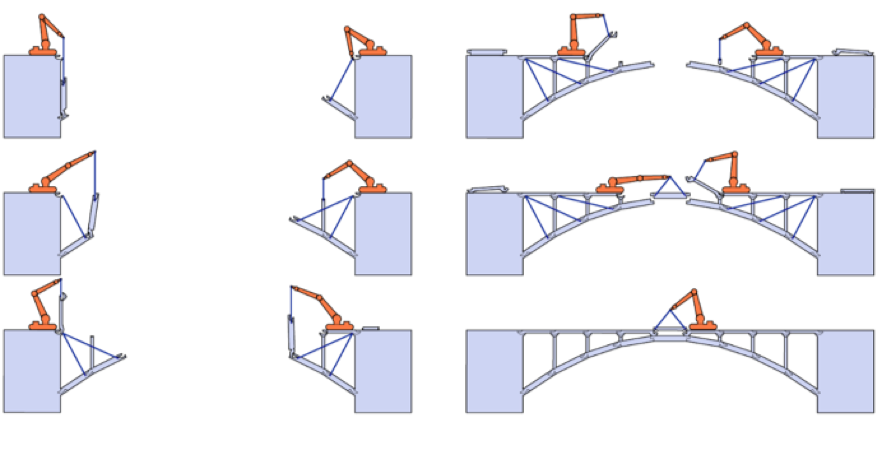
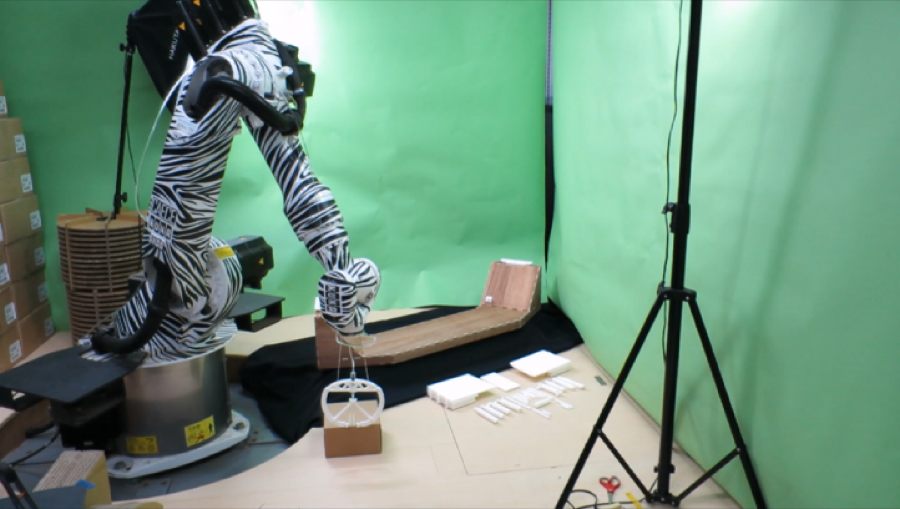
Autonomous Erection System: structural component, rigging mechanism and crane controlStructural erections are extremely critical yet risk in all construction projects. Current erection tasks require multiple workers working long hours in high places for temporally secure the structural elements. In this research, we aim to develop autonomous erection facilitating system to replace the high place workers to reduce on-site person. The system includes (1) new structural connector, (2) versatile and flexible rigging mechanism and (3) precise crane control. The research results will become an important fundamental toward manless construction.
|
|
