
2007In this year , the development of robotics in engineering was just started . Primitive visions of some important researches , such as : Development and application of 4D construction simulation tools , Development of a general-purpose autonomous robot , Physics based simulation for crane manipulation and cooperation , and the study in using an autonomous robot for pavement Inspection , were brought to stages in this year . Also , this is the second year for this lab to be operated .
|
|
Development and application of 4D |
This paper reports the experiences in developing Construction Director, a 4D plant construction simulation system and discusses how the 4D simulation tools
and their major components were designed and built to fulfill CTCI’s requirements . |
於本篇論文中,我們探討了發展Construction Director(一個4D的營建模擬系統)的經驗,並討論4D模擬工具及他們的主要組件是如何設計並達到CTCI的要求。
|
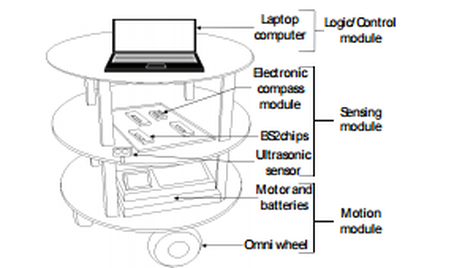
General purpose autonomous robot |
In this research , we present the ongoing research into the design and development of a general-purpose robot and aim to develop an autonomous robot that has a flexible hardware and software architecture .
|
在此研究中,我們呈現了一般目的型機器人的設計與發展,並致力於開發同時具有運用彈性的軟、硬體組件。
|
Physics based simulation for crane |
In this paper , we describe an approach to construct a numerical crane model in a computer-generated virtual world and use a dual-crane scenario to demonstrate .
|
在這份論文中,我們發展了一個如何在VR環境下建置起吊模型的方法,並以一個雙起吊系統的模型作為示範。
|
Autonomous robot for pavement Inspection |
This research presents the application of the motion planning to different pavement inspection tasks and the results of this research are suitable for use with a commercial robot to achieve the goal of robotic pavement inspection .
|
在此研究中,我們介紹了有關以動力規劃來區分不同的路面檢測任務的應用,且此研究的結果可適用於應用商業化型機器人以完成路面檢測的工作。
|
