
營建自動化
|
|
- MicroSoft Robostics Studio (MSRS)與機器人平台整合
蘇詠順、康仕仲
(2008, Jun) 智慧型機器人於營建產業應用研討會。 - 機器人在營建產業之應用
陳奕竹、康仕仲
(2010, Nov) 機器人產業情報,No. 48,技術。 - Development of Tele-Operated Robotics Crane for Improving Erection Operation in Construction
H. L. Chi, Y. C. Chen, S. C. Kang, S. H. Hsieh
(2010, Nov) Proceedings of 10th International Conference on Construction Applications of Virtual Reality (CONVR), Sendai, Japan. - A Smart Crane Operations Assisted System Using Augmented Reality Technology
Y. C. Chen, H. L. Chi, S. C. Kang, S. H. Hsieh
(2011, Jun) Proceedings of 28th International Symposium on Automation and Robotics in Construction (ISARC), Seoul, Korea. - An Erection Information Arrangement Approach for Tele-Operated Crane Interface
Y. C. Chen, H. L. Chi, S. C. Kang, S. H. Hsieh
(2011, Sep) Proceedings of Conference on Computer Applications in Civil and Hydraulic Engineering 2011, Kaohsiung, Taiwan. - Experiences on Designing User Interfaces for a Tele-Operated Crane
H. L. Chi, Y. C. Chen, S. C. Kang, S. H. Hsieh
(2011, Nov) Proceedings of 11th International Conference on Construction Applications of Virtual Reality (CONVR),
Weimar, Germany. - Development of User Interface for Tele-Operated Cranes
H. L. Chi, Y. C. Chen, S. C. Kang, S. H. Hsieh
(2012, Aug) Advanced Engineering Informatics, 26(3), 641-652. - Research Trends and Opportunities of Augmented Reality Applications in Architecture, Engineering, and Construction
H. L. Chi, S. C. Kang, X. Wang
(2013, Aug) Automation in Construction, 33, 116-122. - Control of Fast Crane Operation
T. Y. Kuo, S. C. Kang
(2014, Jun) Automation in Construction, 42, 25-35. - Development of a Steel Beam Hauling System for Automatic Steel Beam Assembly
C. J. Liang, S. C. Kang
(2014, Jun) Proceedings of the 15th International Conference on Computing in Civil and Building Engineering (ICCCBE), Florida, USA. - Robotic Assembly System for Steel Structure
C. J. Liang, S. C. Kang
(2015, May) Proceedings of 2015 Modular and Off-site Construction Summit (MOC Summit) & 1st International Conference on the Industrialization of Construction, Edmonton, Alberta, Canada. - Oscillation Reduction Method for Fast Crane Operation
T. Kuo, Y. C. Chiang, S. Y. Cheng, S. C. Kang
(2015, May) Proceedings of 2015 Modular and Off-site Construction Summit (MOC Summit) & 1st International Conference on the Industrialization of Construction, Edmonton, Alberta, Canada. - A Sway Reduction Controller for Construction Crane
S. Y. Cheng, T. Y. Kuo, C. J. Liang, S. C. Kang
(2015, Jun) Proceedings of 2015 International Symposium on Automation and Robotics in Construction and Mining (ISARC), Oulu, Finland.
橋樑檢測
|
|
- Using Dual Lights for Robotic Pavement Inspection
Y. S. Su, S. C. Kang, J. R. Chang, S. H. Hsieh
(2010, Aug) SICE Annual Conference 2010, Taipei, Taiwan. - A Dual-Light Inspection Method for Automatic Pavement Surveys
蘇詠順、康仕仲、張家瑞、謝尚賢
(2010, Nov) 第九屆鋪面工程材料再生及再利用學術研討會暨2010 世界華人鋪面專家聯合學術研討會,臺北,臺灣。 - A Lightweight Imaged Based Bridge Inspection System Using Fishing Pole, Fishing Line and Fisheye Camera
Y. C. Chen, S. C. Kang, C. E. Yang
(2011, Jun) Proceedings of 28th International Symposium on Automation and Robotics in Construction (ISARC), Seoul, Korea. - 吊索式影像擷取系統於橋梁檢測之應用
楊基恩、陳奕竹、康仕仲、曾冠霖
(2011, Sep) 電子計算機於土木水利工程應用研討會,高雄,臺灣。 - 輕量橋樑檢測系統之原型研究
楊基恩、陳奕竹、康仕仲
(2012, Jun) 第十六屆營建工程與管理學術研討會,臺中,臺灣。 - Dual-Light Inspection Method for Automatic Pavement Surveys
Y. S. Su, S. C. Kang, J. R. Chang, S. H. Hsieh
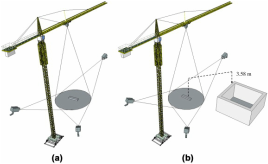
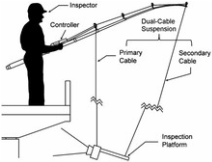
(2013, Sep) Journal of Computing in Civil Engineering, 27(5), 534-54 - A Lightweight Bridge Inspection System Using a Dual-cable Suspension Mechanism
Y. C. Chen, C. E. Yang, S. C. Kang
(2014, Oct) Automation in Construction, 46, 52-63, doi:10.1016/j.autcon.2014.06.005
鋪面檢測
|

|
- 於道路檢測之自主式機器人雛型系統開發
康仕仲、張家瑞、古凱元、林秉宏、陳茂南
(2007, Sep) 中華民國第十四屆鋪面工程學術研討會,雲林,臺灣。 - 機器人於道路自主檢測之虛擬環境開發
張家瑞、康仕仲、曾源緒、曾志煌、巫柏蕙
(2007, Sep) 中華民國第十四屆鋪面工程學術研討會,雲林,臺灣。 - The Study in Using an Autonomous Robot For Pavement Inspection
J. R. Chang, Y. H. Tseng, S. C. Kang and C. H. Tseng
(2007, Sep) Proceedings of International Symposium on Automation and Robotics in Construction, Kochi, Kerala, India. - P3-AT機器人於道路鋪面檢測整合研發
曾源緒、康仕仲
(2008, Jun) 智慧型機器人於營建產業應用研討會,新竹,臺灣。 - 機器人於鋪面檢測之運動規劃
古凱元、康仕仲
(2008, Jun) 智慧型機器人於營建產業應用研討會,新竹,臺灣。 - Implementation of an Autonomous Robot for Pavement Inspection
K. Y. Gu, P. Liu, J. R. Chang, S. C. Kang, S. H. Hsieh
(2008, Oct) Proceedings of 12th International Conference on Computing in Civil and Building Engineering (ICCCBE), Beijing, China. - Measurement of the International Roughness Index (IRI) Using an Autonomous Robot (P3-AT)
J. R. Chang, Y. S. Su, T. C. Huang, S. C. Kang, S. H. Hsieh
(2009, Jun) Proceedings of 2009 26th International Symposium on Automation and Robotics in Construction (ISARC), Austin, Texas, USA. - 以微軟遊戲開發工具(XNA)開發虛擬機器人於道路檢測之模擬系統
李正豪、張家瑞、康仕仲、謝尚賢
(2009, Sep) 第十五屆鋪面工程學術研討會暨2009國際與兩岸專家高峰會議,臺中,臺灣。 - Strategies for Autonomous Robots to Inspect Pavement Distresses
Y. H. Tseng, S. C. Kang, J. R. Chang, C. H. Lee
(2009, Dec) Automation in Construction, 20(8), 1156-1172. - Strategies for Autonomous Robot to Inspect Pavement Distresses
Y. H. Tseng, S. C. Kang, Y. S. Su, C. H. Lee
(2010, Oct) Proceedings of Conference on Intelligent Robots and Systems (IROS) 2010, Taipei, Taiwan. - Strategies for Autonomous Robots to Inspect
Pavement Distresses
Y. H. Tseng, S. C. Kang, Y. S. Su, J. R. Chang, C. H. Lee
(2011, Dec) Automation in Construction 20(8), 1156-1172.
無人飛行機
|

|
- 策略剖析工具─以濁水溪綜合流域治理為例
楊政玹、劉晉瑋、翁琬晴、傅金城、江申、康仕仲、蔡孟涵
(2013, Nov) 臺灣災害管理研討會,臺北,臺灣。 - Optimized Integration of UAVs, Surveys, and Image-based Modeling Strategies for Digital Terrain Model Reconstruction
M. C. Wen, C. H. Yang, E. X. Sung, T. H. Wu, S. C. Kang
(2014, Nov) Proceedings of 14th International Conference on Construction Applications of Virtual Reality (CONVR) in Construction and Islamic Architecture, Sharjah, UAE. - An Optimized Unmanned Aerial System for Bridge Inspection
C. H. Yang, M. C. Wen, Y. C. Chen, S. C. Kang
(2015, Jun) Proceedings of 2015 International Symposium on Automation and Robotics in Construction and Mining (ISARC), Oulu, Finland. - Optimized Unmanned Vehicle System for Disaster Inspection
M. C. Wen, C. H. Yang, Y. C. Chen, E. X. Sung, S. C. Kang
(2015, Jun) Proceedings of 2015 International Symposium on Automation and Robotics in Construction and Mining (ISARC), Oulu, Finland. - 沖積扇數值地形模型資料蒐集-無人飛行載具 之系統設計與實作
楊政玹、溫明璋、吳宗翰、蔡孟涵、康仕仲
(2015, Nov) 中國土木水利工程學刊。27(3),263-270。
機器人教育
|

|
- The Development of a General-purpose Autonomous Robot
K. Y. Gu, S. C. Kang, P. H. Lin, J. R. Chang, M. N. Chen
(2007, Sep) Proceedings of International Symposium on Automation and Robotics in Construction, Kochi, Kerala, India. - Microsoft Robotics Developer Studio實戰手冊 - 智慧型機器人程式模擬與開發
康仕仲、古凱元、紀宏霖
(2008, Oct) 悅知文化,臺灣。 (ISBN 978-986-6761-61-4) - 智慧型機器人程式開發與實作
康仕仲、張慰慈、古凱元、紀宏霖
(2009, Sep) 悅知文化,臺灣。 (ISBN 978-986-6348-09-9) - 動起來!百變樂高機器人
康仕仲、曾吉弘、蔡宛庭、黃裕軒、楊耀畬
(2009, Oct) 悅知文化,臺灣。 (ISBN 978-986-6348-14-3) - Robot Development Using Microsoft Robotics Developer Studio
S. C. Kang, W. T. Chang, K. Y. Gu, H. L. Chi
(2011, Jun) Chapman & Hall/CRC, USA. (ISBN 978-1-4398-2165-7) - Using Robot Kits for Teaching Railway Engineers
Y. C. Lai, H. L. Chi, W. C. Cheng, S. C. Kang
(2012, Jan) Computational Design Methods and Technologies: Applications in CAD, CAM and CAE Education, IGI Global, Hershey, PA, USA. (ISBN 978-1-6135-0180-1) - Using Robot Kits for Teaching Railway Engineers
Y. C. Lai, H. L. Chi, W. C. Cheng, S. C. Kang
(2012, Sep) Journal of Information Technology in Construction, 17, 416-433. - 智慧生活/物聯網 IOT 互動科技應用與設計
康仕仲、張慰慈、楊政玹、楊舒涵、程鏡羽
(2015, Apr) 旗標出版股份有限公司,臺北,臺灣。 (ISBN 978-986-3122-29-6)
其他專案
|

|
- BotBeep – An Affordable Warning Device for Wheelchair Rearward Safety
C. J. Liang, Y. Y. Yang, Y. S. Lin, S. C. Kang, P. C. Lin, Y. C. Chen
(2013, Mar) Proceedings of the 2013 International Conference on Orange Technologies, Tainan, Taiwan. - 可攜式水流表面流速影像偵測裝置之研發
楊耀畬、林聖峰、溫明璋、張文鎰、康仕仲
(2013, Oct) 水利工程研討會,宜蘭,臺灣。 - Development of A Portable PIV for On-site Flow Field
Y. Y. Yang, F. Lin, M. C. Wen, W. Y. Chang, S. C. Kang
(2013, Oct) 9th APRU Research Symposium on Multi-Hazards around the Pacific Rim, Taipei, Taiwan.
