
2011
In this year , several innovative researches applying new technologies were brought to stage , such as : Using AR models in engineering graphics course , Game engine for physics-based simulation . Also , robotics development using MSRDS , Pavement distresses inspection using autonomous bobotics and a research on Dual-Light inspection method were also continued . Besides , a research about using AR in a tele-operated crane system and designing its UI was also started in this year .
|
|
AR model in engineering graphics |
In this project , we aims to develop two teaching aids; a tangible model and an augmented reality (AR) model, to help students better understand the relationship between 3D objects and their projections .
|
在此研究中,我們致力於發展實體模型與擴增實境的模型以幫助學生理解3D物件及他們的投影間的關係。
|
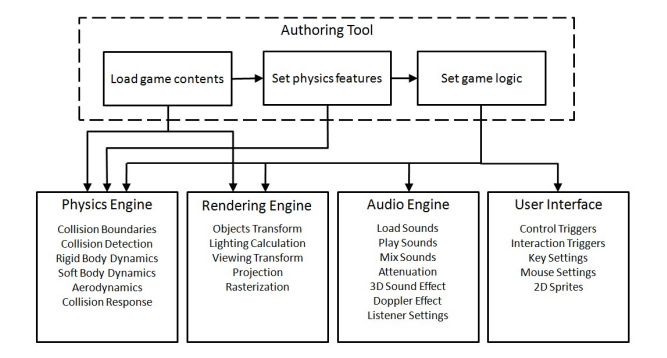
Game engine for simulation |
This research aims to utilize a game engine, which has been a rapidly evolving field for over a decade, to reduce the effort required by developers .
|
藉由這個研究,我們的目標為應用電玩引擎,並用其降低開發者所需要付出的辛勞。
|
Robotics development using MSRDS |
In this textbook , we provide clear instructions on developing and operating robots. It includes an extensive array of examples, with corresponding step-by-step tutorials and explanations.
|
在這本教科書中,我們為發展及運作機器人提供了清楚的指示,其包含了一系列大量的範例與詳細步驟的說明。
|
Designing UI |
This research focuses on the design of the user interface for a tele-operated crane system .
|
藉由此研究,我們為遠端操作的起吊系統設計了一個使用者介面。
|
Erection information arrangement method |
In this research , we continue to work on an erection information arrangement method for a tele-operated crane system .
|
此研究中,我們致力於發展遠端操作的起吊系統的相關配置方法。
|
Using AR in crane operated system |
In this research , we try to propose an integrated environment to provide a rich information environment to operators during the erection processes .
|
在此研究中,我們嘗試提出一個完善且有豐富資訊的環境以提供工作者在起吊過程中所需的幫助。
|
Technology-supported safety management |
This project aims to provide a safer environment for workers by using an iPad application in field inspection .
|
藉由這個研究,我們提供工作者在利用iPad應用程式的情況下,能獲得一個較為安全的工作環境。
|
Lightweight bridge inspection system |
In this research , we design and implement a portable device to facilitate the inspection . The proposed system is lightweight , including a camera and a transmitter for real-time transmission of inspection data .
|
在此研究中,我們設計了一個可攜帶式的裝置以用於橋梁的觀測,此輕量化的系統包含了一個攝影機及即時傳輸觀測資料的發信器。
|
Pavement Distresses |
Strategies for autonomous robots to inspect pavement distresses .
|
發展使用自動化機器人作為路面問題檢測的策略。
|
